Motion Planning for Mobile Manipulators
Mobile manipulators, having both mobility from the platform and agility from the manipulator, have become a promising solution to bringing autonomy to the real-world. These research projects focus on motion planning for mobile manipulators in dynamic environment where obstacles are moving in the surroundings, or even uncertain environment where there are unknown factors (e.g., unseen obstacles) that will affect the robot performance.
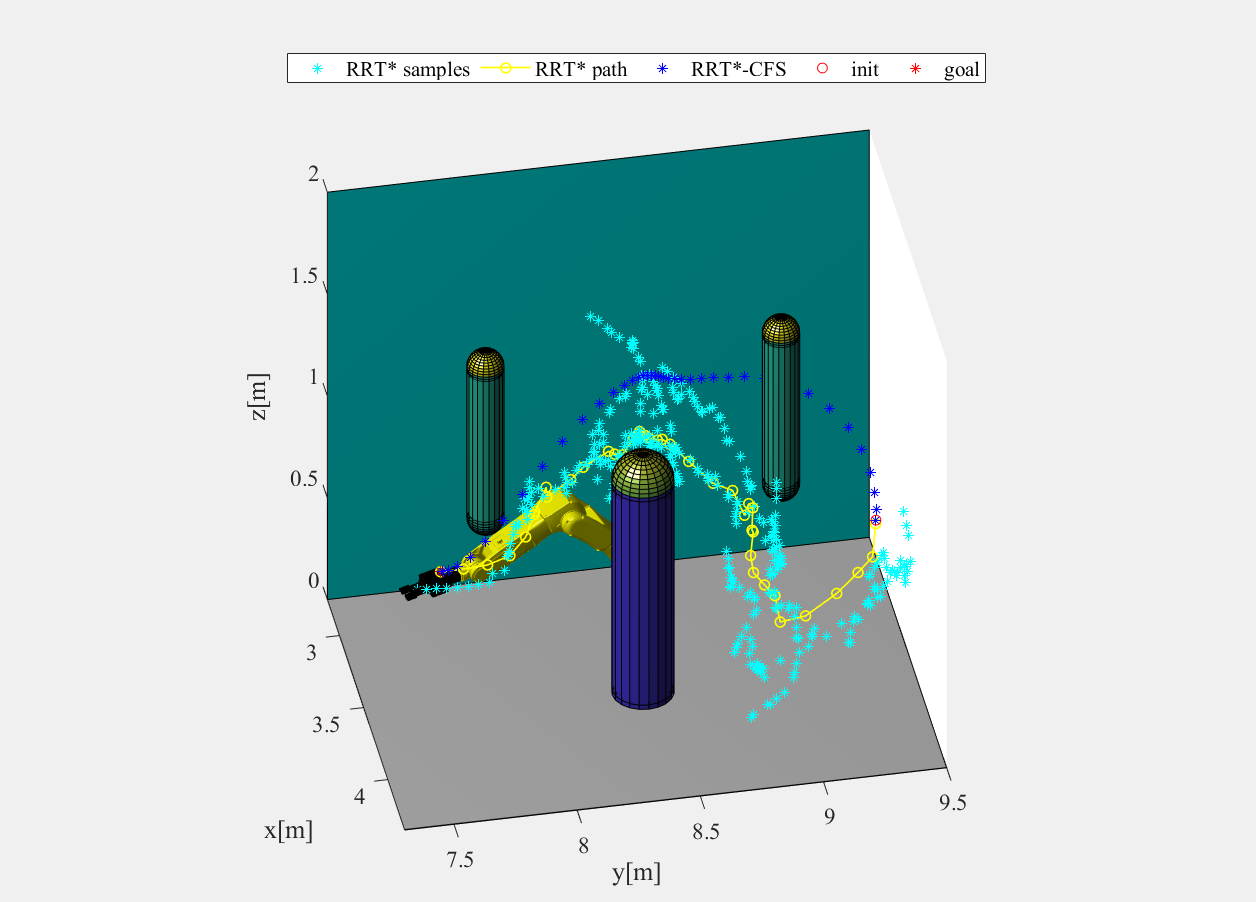
Safe and Coordinated Hierarchical Receding Horizon Control for Mobile Manipulators
This paper presents a method, hierarchical receding horizon control algorithm (HRHC), to assure safety and a
chieve higher time and space efficiency in robots surrounded by time-varying environments. HRHC contains an optimization
based motion planning module that takes account of both the mobile platform and the manipulator to utilize the kinematic redunda
ncy, and a low-level safety controller to deal with fast changes in the environment.
|
|
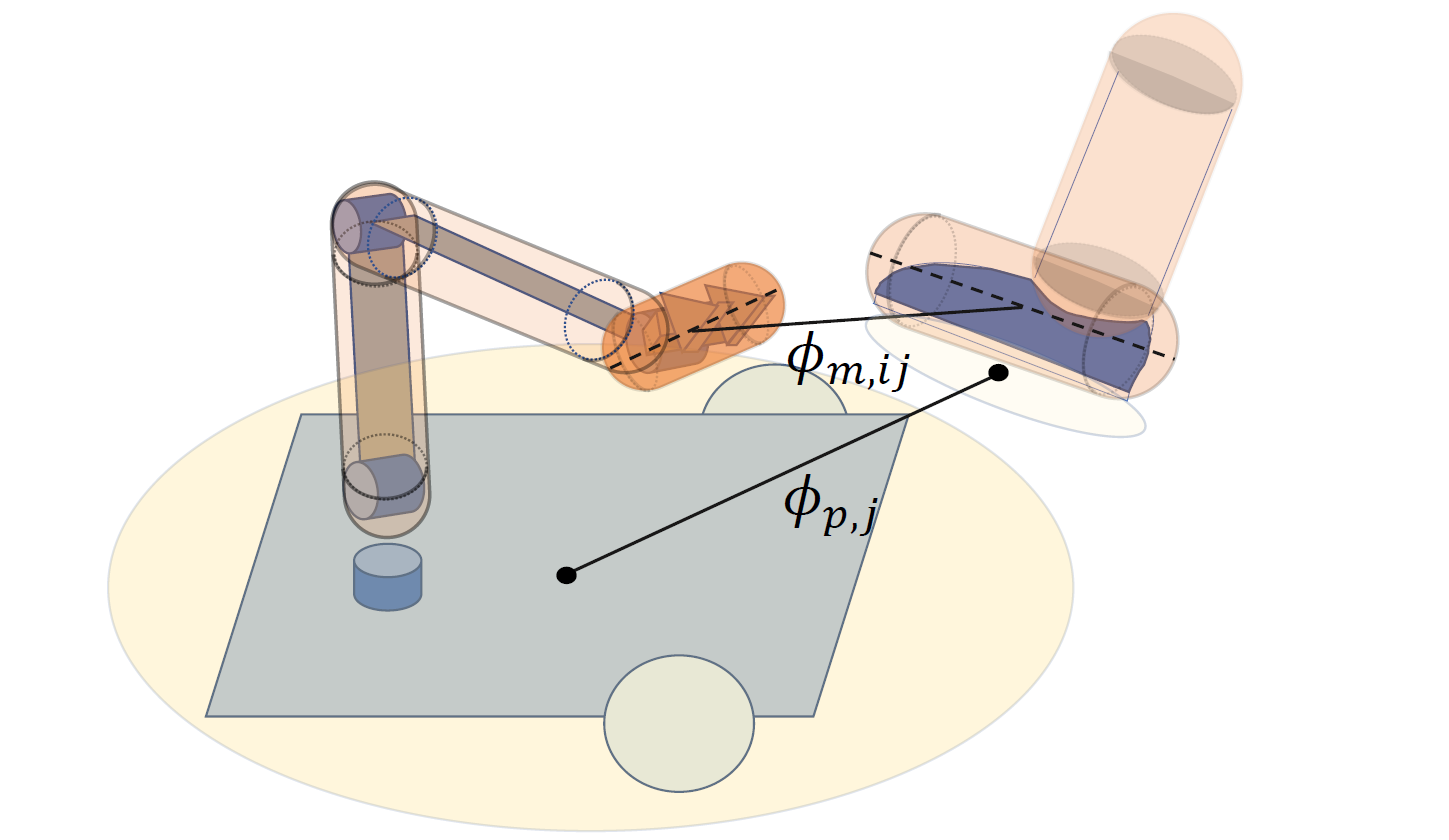
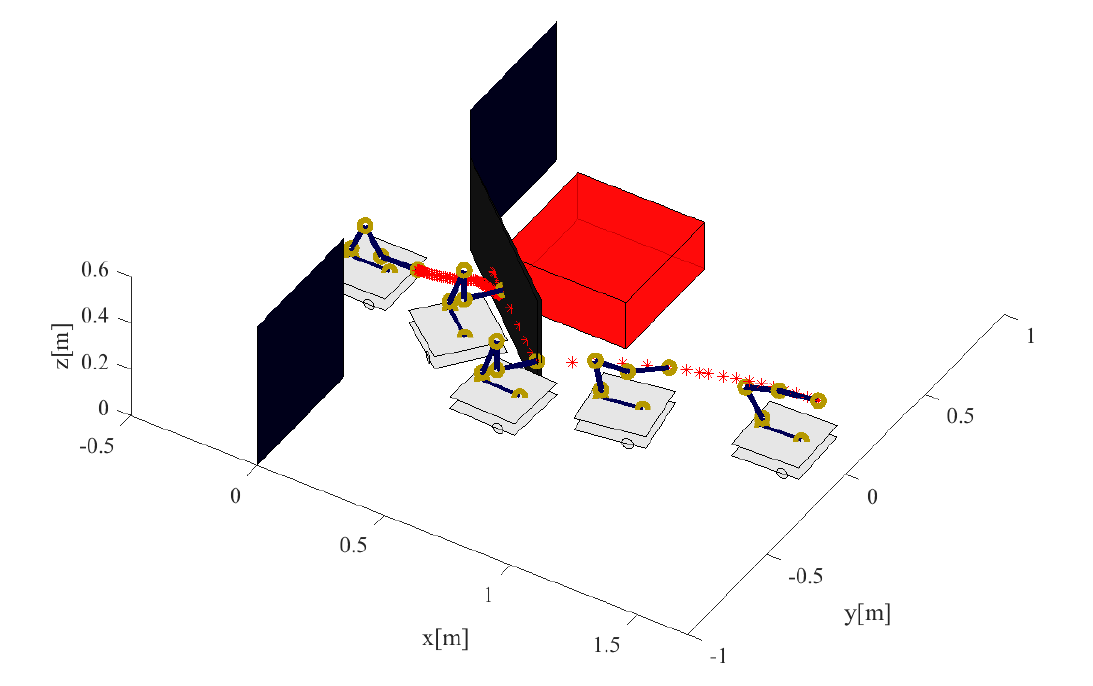
Motion Planning for Mobile Manipulators with Physical Contact in Uncertain Environment
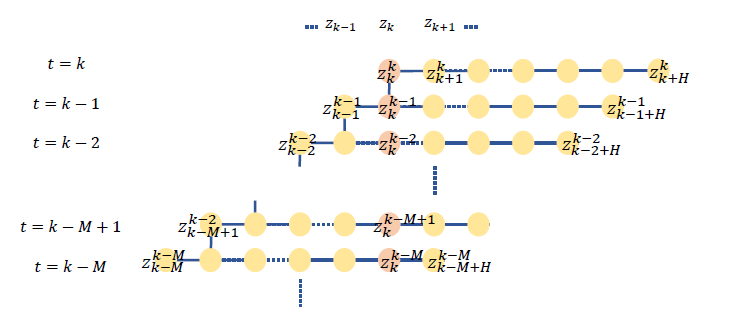
We formulate the uncertainty-exploring motion planning as a partially observable Markov decision process (POMDP)
with an additional reward term to encourage uncertainty exploration. We also present a hybrid optimization algorithm, namely, the Hamiltonian
Monte Carlo sampling with convex feasible set algorithm (HMCCFS), to solve the POMDP efficiently.
|
|