|
|
| Safe and Efficient Motion Planing |
|
|
|
| Motion Planning Algorithm and Analysis |
| Motion planning is one of the most crucial factors to realize autonomy in real-world applications. These research projects focus on developing new motion planning algorithms and evaluating closed-loop/ open-loop motion planning performance. |
|
|
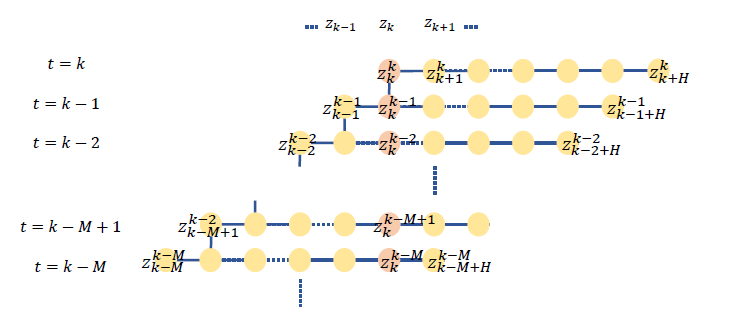
Motion Planning for Industrial Mobile Robots with Closed-loop Stability Enhanced Prediction
Read More
|
|
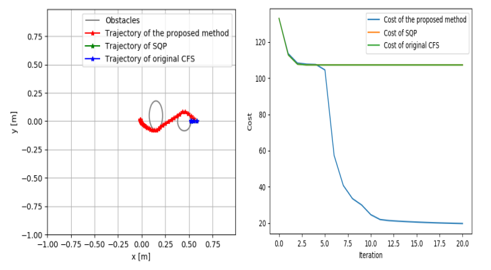
PSGCFS: An Optimization-based Algorithm for Real-time Motion Planning
Read More
|
|
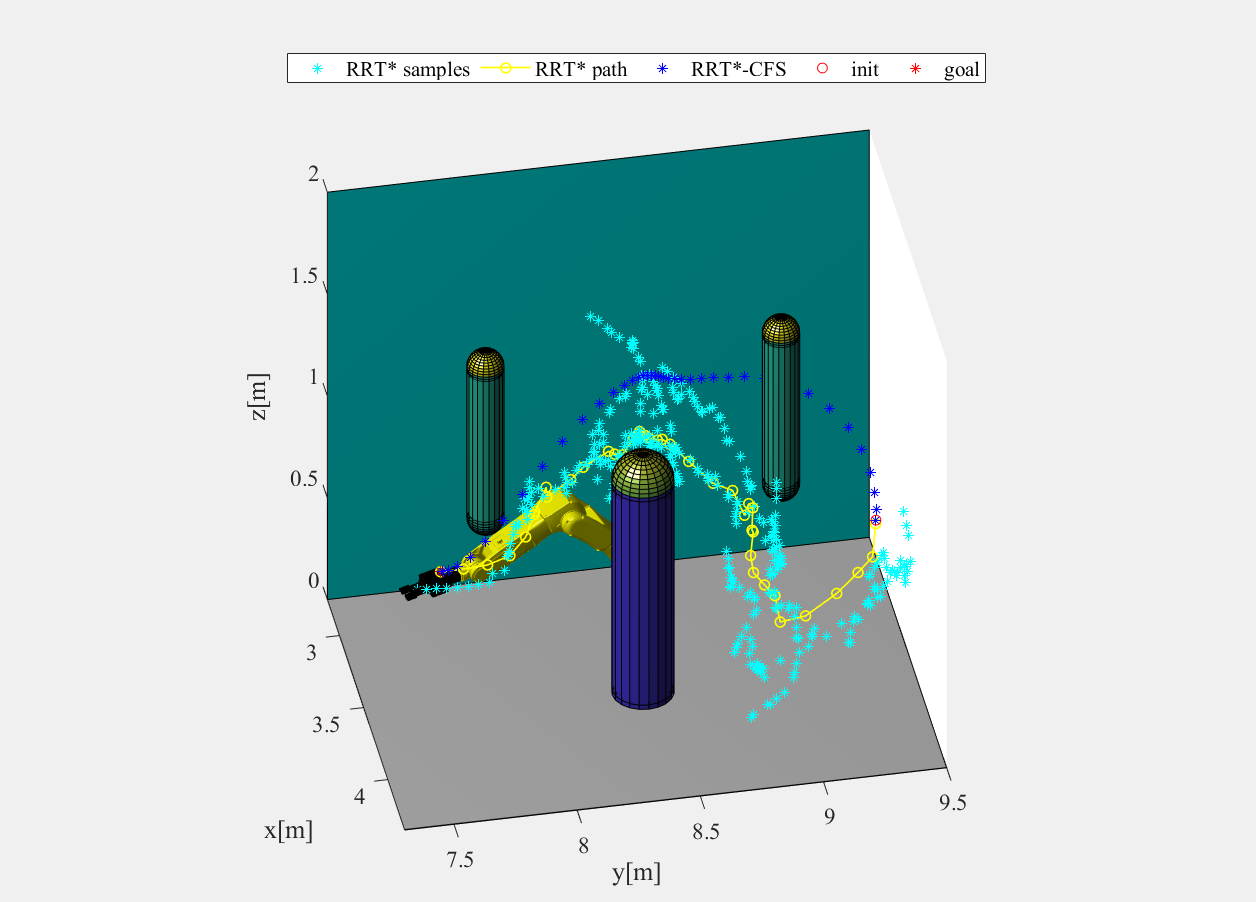
Efficient Robot Motion Planning via Sampling and Optimization
Read More
|
|
|
|
| |
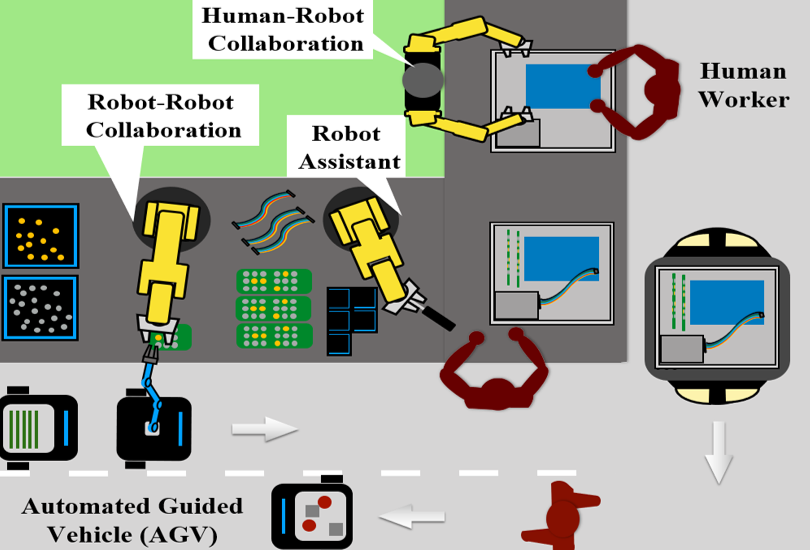
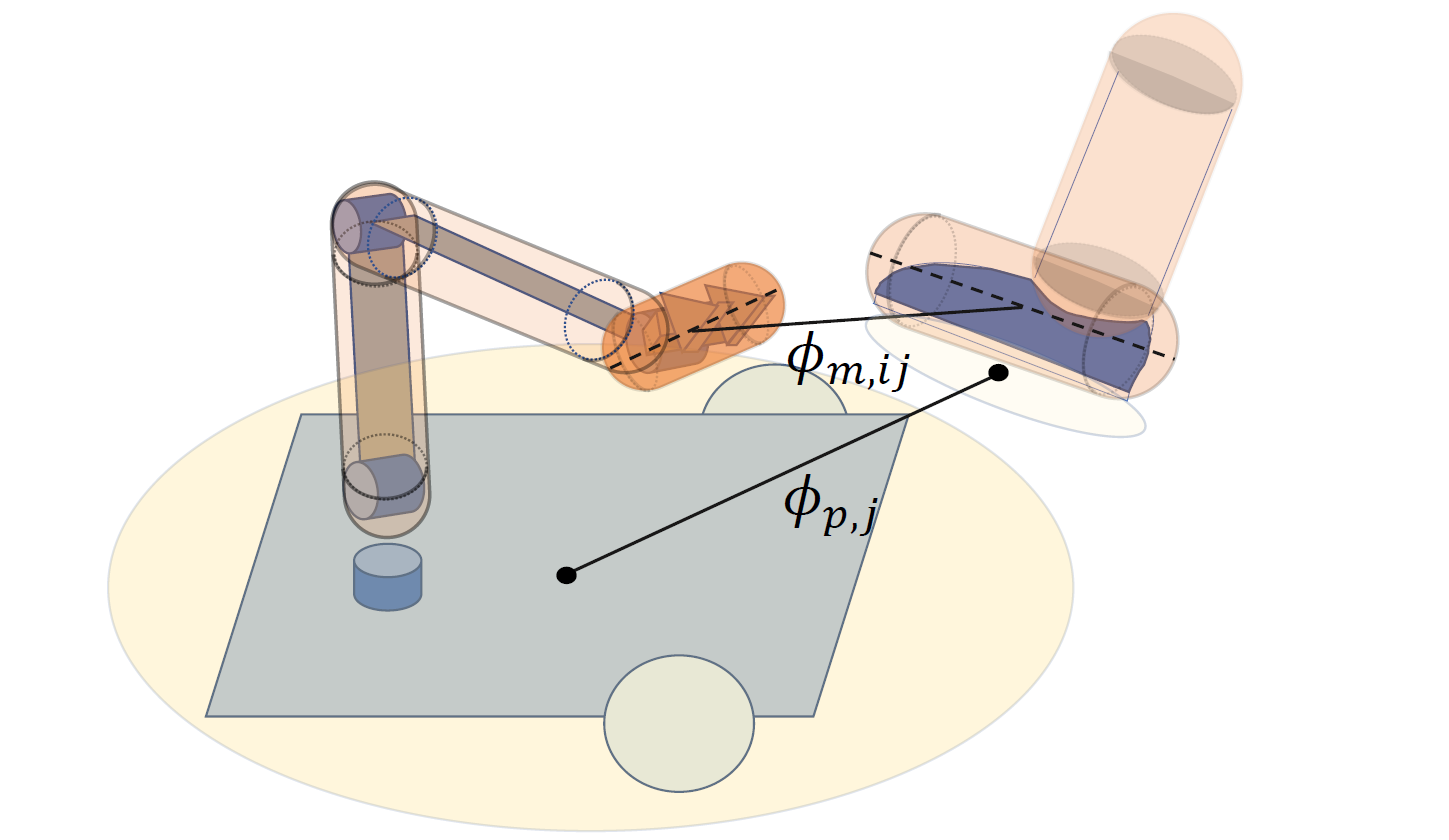
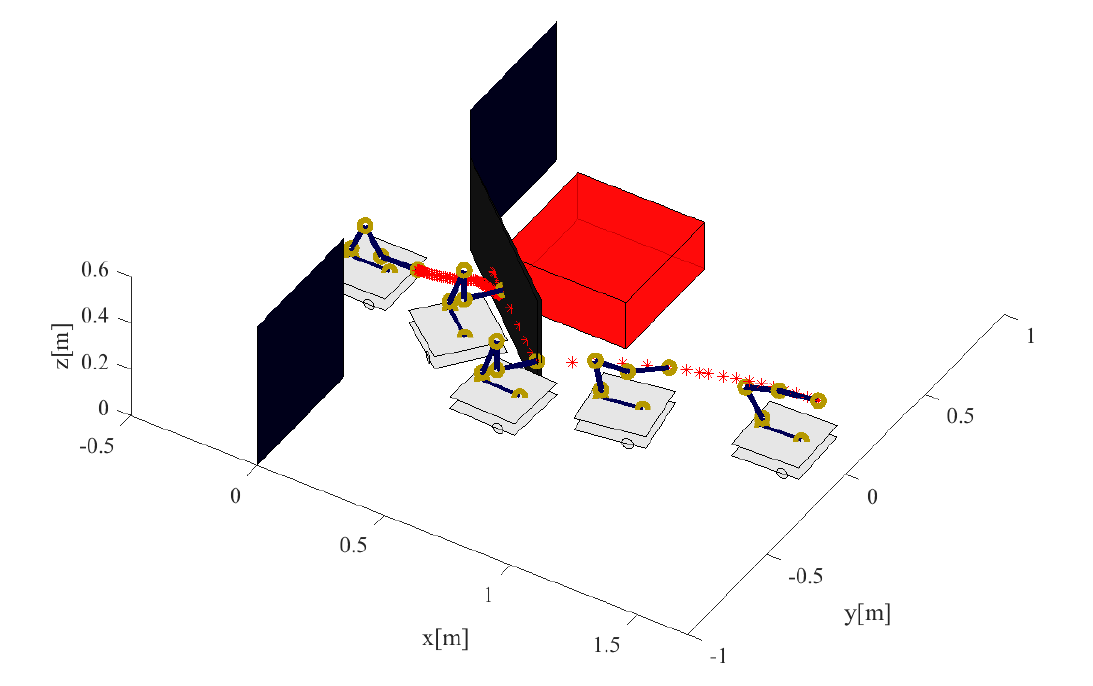
| Motion Planning for Mobile Manipulators |
| Mobile manipulators, having both mobility from the platform and agility from the manipulator, have become a promising solution to bringing autonomy to the real-world. These research projects focus on motion planning for mobile manipulators in dynamic environment where obstacles are moving in the surroundings, or even uncertain environment where there are unknown factors (e.g., unseen stacles) that will affect the robot performance. |
|
Safe and Coordinated Hierarchical Receding Horizon Control for Mobile Manipulators
Read More
|
|
Motion Planning for Mobile Manipulators with Physical Contact in Uncertain Environment
Read More
|
|
|
|